













[해외]Boston Dynamics Dog, 3D프린팅 로봇 복제본 제공-오픈 소스
- 2020-07-14
- 관리자
○ 본문요약 :
NYU Tandon의 전기 및 컴퓨터 공학 및 기계 및 항공 우주 공학 부교수 인 Ludovic Righetti 는 로봇 공학을보다 쉽게 접근 할 수 있도록 돕는 Solo 8 팀의 사명을 이끌었습니다. 개방형 다이나믹 로봇 이니셔티브에 힘 입어 Righetti 및 MPI-IS 연구원 인 Felix Grimminger 와 Alexander Badri-Spröwitz 는 2016 년 Righetti의 ERC 시작 보조금으로 자금을 조달하여 프로젝트를 시작했습니다.
Ludovic Righetti, associate professor of electrical and computer engineering and mechanical and aerospace engineering at NYU Tandon, led the collaborative Solo 8 team in its mission to make teaching and researching robotics more accessible. Backed by the Open Dynamic Robot Initiative, Righetti and MPI-IS investigators Felix Grimminger and Alexander Badri-Spröwitz began the project in 2016 with funding from Righetti’s ERC Starting Grant.
Solo 8은 훨씬 더 고가의 로봇과 같은 역할을합니다. 작동 조인트와 토크 제어 모터를 사용하면 여러 방향으로 걷거나 넘어지고 넘어지면 다시 돌아올 수 있습니다.
Solo 8 acts like a much costlier robot: its actuated joints and torque-controlled motors allow it to walk in several directions, jump, and pick itself back up if it falls over.
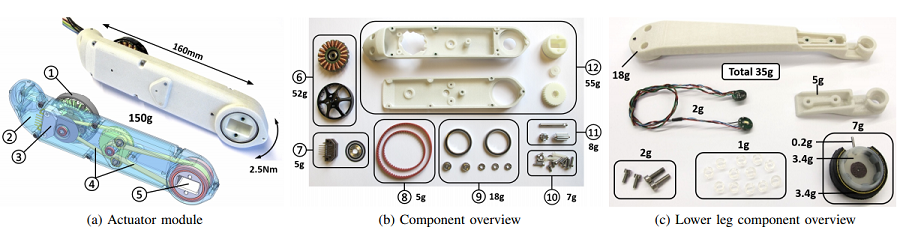
브러시리스 액추에이터 모듈 (a) 조립, (b) 개별 부품. BLDC 모터 (1), 2 파트 3D 프린트 쉘 구조 (2), 고해상도 엔코더 (3), 타이밍 벨트 (4) 및 출력 샤프트 (5). 브러시리스 모터 (6), 광학 인코더 (7), 타이밍 벨트 (8), 베어링 (9), 패스너 (10), 가공 부품 (11) 및 3D 인쇄 부품 (12). 11을 제외한 모든 부품은 기성품 또는 3D 인쇄 가능합니다. 모터 샤프트와 풀리 (11)는 스톡 재질로 가공 할 수 있습니다. (c) 다리와 발 접점 스위치 구성 요소를 내립니다.
2킬로그램이 조금 넘는 무게의 Solo 8은 대부분의 다른 사중 로봇보다 중량 대 중량비가 높기 때문에 실험실에서 더 안전하고 쉽게 취급 할 수 있으며 배낭에 넣을 수도 있습니다. 모든 구성 요소를 구매하거나 3D로 인쇄 할 수 있으며 팀은 BSD 3 절 라이센스에 따라 GitHub에서 시공 파일 을 무료로 제공합니다. 다른 연구원들은 자신의 실험에서 데이터를 수집하고 공유 할 수있어 로봇 공학 분야에서 더 빠른 발전을 이끌 수 있기 때문에 로봇을 오픈 소스 플랫폼으로 설계하려는 팀의 결정을 통해 혜택을 얻을 수 있습니다.
Weighing in at a little over two kilograms, Solo 8 has a higher power to weight ratio than most other quadruped robots, which makes it safer and easier to handle in a laboratory, and you can even carry it in a backpack. All of its components can be purchased, or 3D printed, and the team has made the construction files available for free on GitHub under the BSD 3-clause license. Other researchers will benefit from the team’s decision to design the robot as an open source platform, as they will able to gather and share data from their own experiments, leading to faster progress in the field of robotics.
○ 출처 : 
https://3dprint.com/270090/open-source-quadruped-robot-with-3d-printed-components/


